Stepmotor
Bi-polare stepmotor og uni-polare stepmotor
Den Bi-polare stepmotor har kun to viklinger, og de har ingen forbindelse med hinanden. Typen kan kendes på at der kun kommer 4 ledninger ud af motoren.
Den uni-polare stepmotor har 4 viklinger, der sidder sammen to og to på samme anker, så de kan polarisere ankeret hver sin vej. Typen kan kendes på at der kommer 6 ledninger ud af motoren.
Nedenstående programeksempel er til en Bi-polare stepmotor
Softwaren kan styre motoren på to forskellige måder. Som full-step vil der altid være spænding på begge spoler, og dermed er det den måde der holder bedst styr på motoren. Faserne kommer som følger:
 Den anden styringsmåde er half-step, hvor der kommer dobbelt så mange step pr. omgang, men til gengæld er der tidspunkter hvor kun den ene vikling er tændt, hvilket gør at den heller ikke kan trække så meget, hvis man styrer den på denne måde. Faserne ser så ud som følger:
Den anden styringsmåde er half-step, hvor der kommer dobbelt så mange step pr. omgang, men til gengæld er der tidspunkter hvor kun den ene vikling er tændt, hvilket gør at den heller ikke kan trække så meget, hvis man styrer den på denne måde. Faserne ser så ud som følger:
 Dette programeksempel styrer en stepping motor efter full-step princippet
Dette programeksempel styrer en stepping motor efter full-step princippet
|
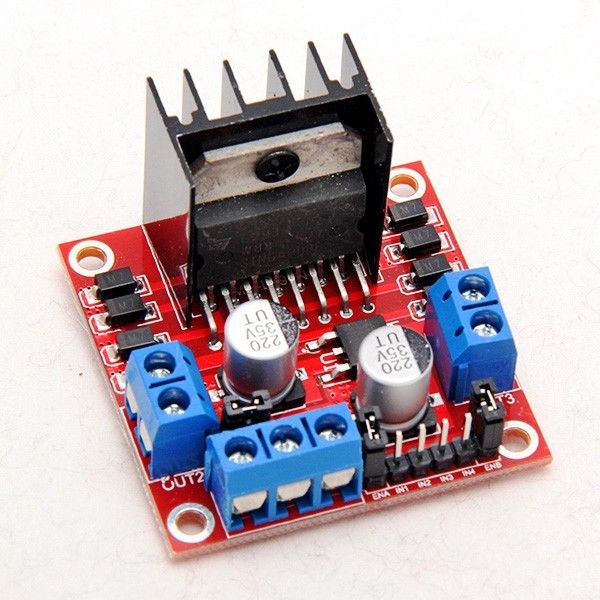
Power stik
| Ben | Anvendelse |
|---|
| +12V | 7-12V forsyning spænding |
| GND | Ground |
| +5V | 5V ud, til externe formål |
Motor stik
| Ben | Anvendelse |
|---|
| Out1 | Vikling A + |
| Out2 | Vikling A - |
| Out3 | Vikling B + |
| Out4 | Vikling B - |
Styring motor A
| Ben | Arduino pin |
|---|
| IN1 | D2 |
| IN2 | D3 |
| IN3 | D4 |
| IN4 | D5 |
|