Arduino kildekode
DRV8825 stepper motor driver
Download DRV8825 datablad
Download Stepper library
Køb DRV8825
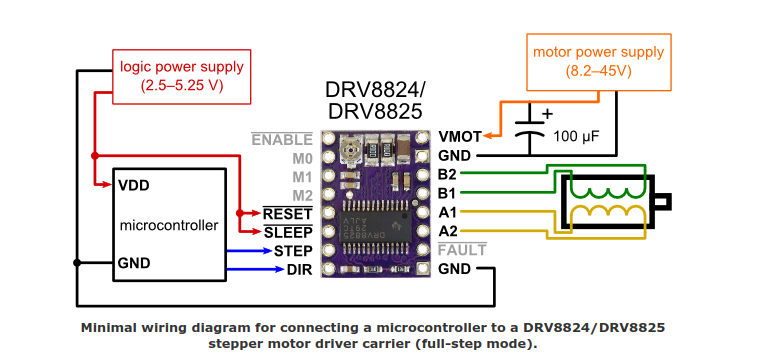
| Driver | Arduino | MotorNEMA 17 | Bemærkning |
|---|---|---|---|
| EN | - | !Enable, pull high for emergency stop | |
| M0 | - | Microstep Resolution bit 0 LSB | |
| M1 | - | Microstep Resolution bit 1 | |
| M2 | - | Microstep Resolution bit 2 MSB | |
| Rst | 5v | - | Reset When this pin is pulled LOW, all STEP inputs are ignored |
| Slp | 5v | - | Sleep. Pull down to save power, when motor is not used |
| Stp | D2 | - | Step |
| Dir | D2 | - | Direction. Pulling. HIGH turns the motor clockwise, pulling LOW turns it counterclockwise. |
| Gnd | GND | - | Gnd |
| Flt | Stel | - | !Faut LOW whenever FETs are disabled as the result of over-current protection or thermal shutdown |
| A2 | 6 | Motor coil B top | |
| A1 | 3 | Motor coil B bund | |
| B1 | 4 | Motor coil A top | |
| B2 | 1 | Motor coil A bund | |
| Gnd | - | Motor stel | |
| Vmot | - | Motor supply 8.2 to 45 volt |
M0, M1, M2 pins are pulled LOW by on-board pull-down resistors.
| M0 | M1 | M0 | Microstep Resolution |
|---|---|---|---|
| Low | Low | Low | Full step |
| High | Low | Low | Half step |
| Low | High | Low | 1/4 step |
| High | Low | Low | 1/8 step |
| Low | Low | High | 1/16 step |
| High | Low | High | 1/32 step |
| Low | High | High | 1/32 step |
| High | High | High | 1/32 step |
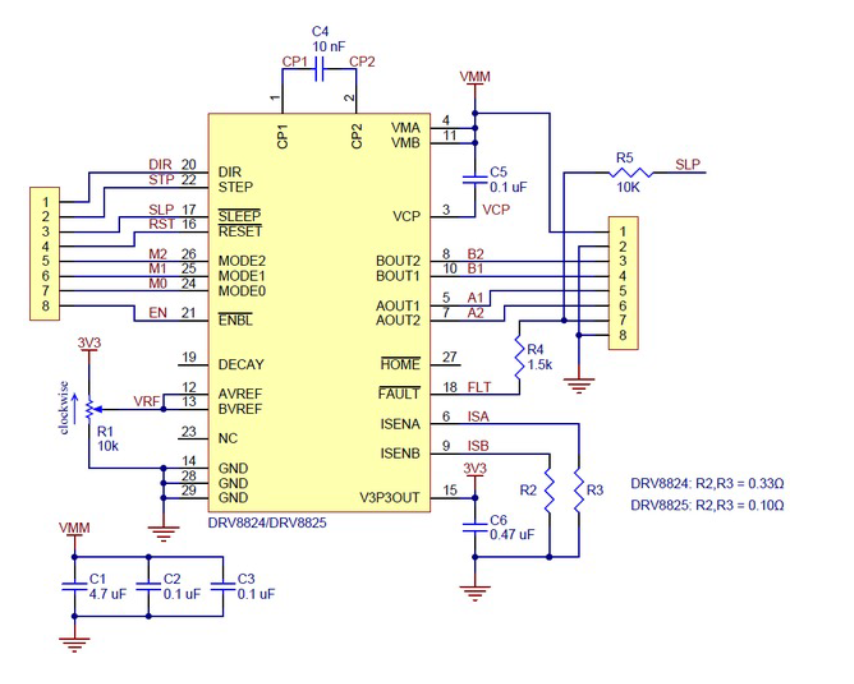
Diagram